
© Fraunhofer FHR
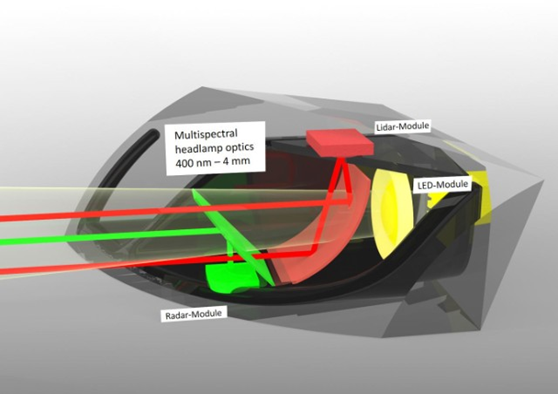
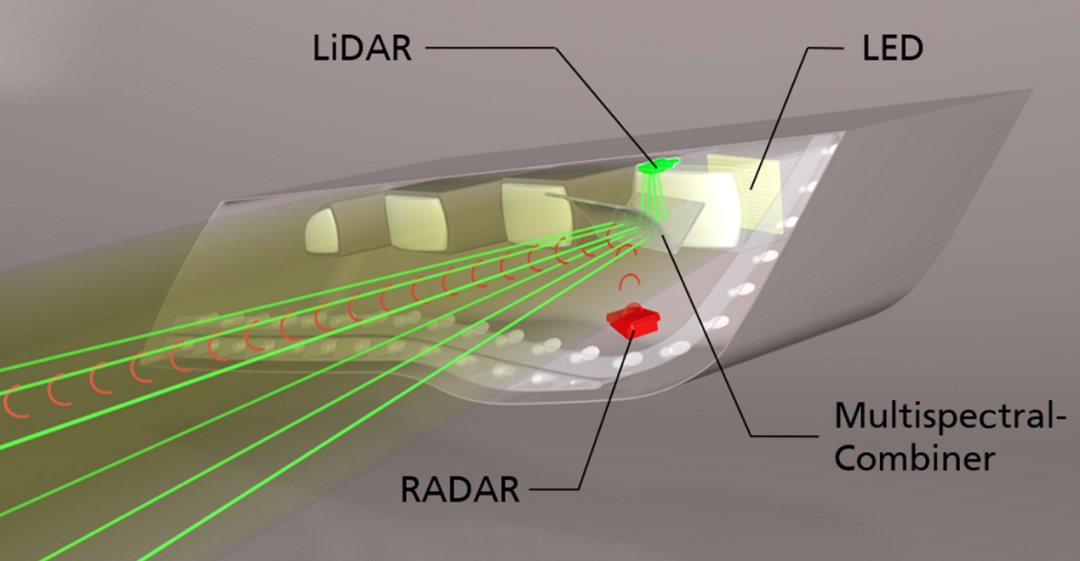
带有多光谱组合器的LED车前灯模型,用于同轴组合光线、LiDAR(红色)和雷达辐射(绿色),为下一代驾驶辅助系统节省传感器集成空间
现如今汽车能够独立完成更多工作:巡航控制系统能够自动与前车保持间距,车道保持辅助系统调整车辆位置,应急制动装置在驾驶员注意力不集中是也会启动。这是由乘客位置上的摄像头和散热器格栅内的雷达传感器实现的。未来汽车能够完成更多任务,而这就需要传感器厚度大幅降低。但设计师十分不认可在散热器上铺满传感器的想法。
“我们将雷达和LiDAR传感器整合到现有的车前灯中,这保证了光学传感器和光源能以最佳形式传输并不受污染。“弗劳恩霍夫FHR的科学家Tim Freialdenhoven如是说。LiDAR(光探测和测距)传感器的工作原理是确定激光脉冲的发射和反射光的接收之间的时间,因此可以非常精确地测量距离。
© Fraunhofer FHR
多光谱车前灯光学的三维可视化图片
第一步是设计LiDAR系统以整合到汽车系统中。此外,从车前灯落到路面上的光线不应受到两个额外传感器的影响——但发光的LED位于车前灯的最后面。因此,研究人员将LiDAR传感器放在车前灯外壳的顶部,雷达传感器放在底部。然而,这两个传感器系统的光束应该与LED灯的路径相同。由于所有的光束都有不同的波长,这就更加复杂了。可见的车前灯光波长在400至750纳米的范围内,而红外LiDAR光束则相当接近可见范围,为860至1550纳米。”这三个波长将被同轴组合,即在同一轴上,这就是为什么我们称之为多光谱组合器。“Freialdenhoven强调说。同轴光束引导对于避免视差误差非常重要,而这必须先以复杂的方式计算出来。此外,将传感器并排排列会比同轴排列占用更多空间。研究人员用所谓的双组合器来解决这个问题:一个特殊涂层的双丘陵镜被用于LED光和LiDAR光的组合,利用它将两束光通过特定波长的反射带入一个轴。第二个组合器也是如此,它将LED光、LiDAR光和雷达结合在一起,尽管由于波长非常不同,但其方式并不复杂。由于雷达传感器已经在汽车领域广泛使用,因此双组合器的设计将使制造商能够继续使用现有的传感器,而无需进行调整。
2. 雷达系统可穿透雾气
但为什么要把光学系统、LiDAR和雷达结合起来呢?"每个单独的系统都有其优势,但也有其劣势。"Freialdenhoven解释道。例如,光学系统在雾和灰尘中,即在光学能见度非常差的条件下,会达到使用极限。另一方面,雷达系统几乎可以不受阻碍地看透浓密的云雾。但它们的分类能力并不高:雷达虽然可以识别是人是树,但无法与LiDAR的分类能力相比。"我们还在努力融合来自雷达和激光雷达的数据——这尤其在可靠性方面提供了极高的附加值。"Freialdenhoven说。一项专利已经提交,该团队目前正在努力建造一款原型样品。
该技术大大扩展了驾驶辅助系统组合传感器的可能性。更小的光模块、更紧凑的LiDAR传感器和集成雷达传感器允许实施多传感器概念,特别是用于设计要求不断提高和安装空间十分有限的自动驾驶。这样一来,自动驾驶系统将不仅能够识别一个人,还能分析他们的速度、与汽车的距离和站位角度。